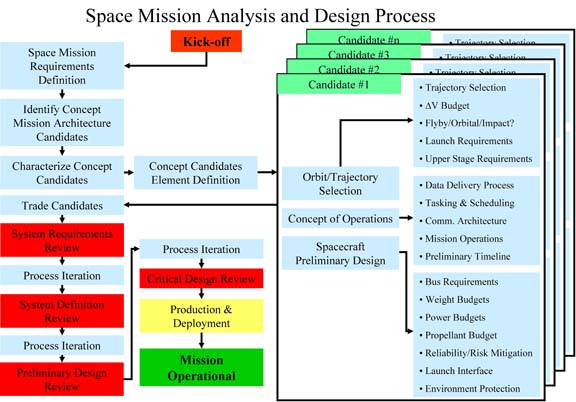
Figure 8. Spacecraft Mission Analysis and Design Process used for Neighborhood Watch effort implemented an iterative approach to enable success and mitigate mission risk.
This section of the report gives a detailed description of the Percival development effort. Space mission concept architecture, spacecraft design components, and all aspects of the development and implementation of the Mars ISR Probe, Percival, is discussed. As the previous section discussed the need for this effort, this section will describe in detail the most rapid interplanetary spacecraft and mission development effort in the history of mankind. In order to undertake such a development, an understanding of the spacecraft mission analysis and design process is required. Figure 8 shows the iterative (hybrid spiral) approach used to develop the program.
Prior to the kick-off meeting held at the Redstone Arsenal, Alabama, an organization and work breakdown structure (WBS) was generated. The notional WBS contained the mission design components and task elements. Each element was designated a team or task leader by the end of the three day meeting. Details of the WBS can be found in the contracts part of the final report (sent through contracts office) but the initial WBS elements are given in Figure 9 in order to express the requirements of the space mission elements and a general view of the organizational structure required to handle such a project. As it turned out, this structure proved to be quite successful.
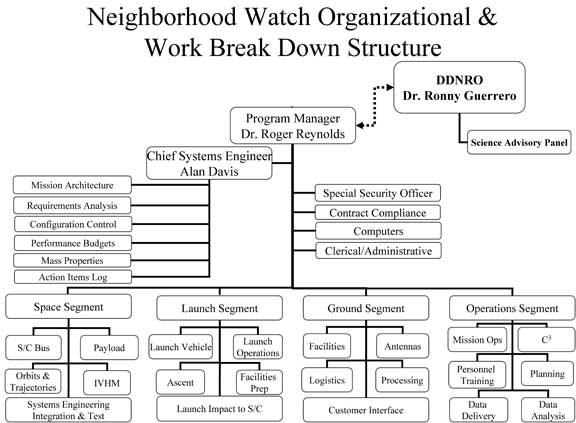
Figures 8 and 9 illuminate the complexity of the spacecraft mission analysis and design process and task elements. This process was further complicated by the fact that ISR was needed abruptly and therefore we had to operate these process components under a compressed schedule. We used the DoD approach for space mission scheduling – although it was greatly compressed – and the final schedule approach is shown in Figure 10. The typical DoD approach is approximately a 30-72 month schedule depending on the complexity of the mission. Note that the Neighborhood Watch schedule was compressed to roughly 10 months.
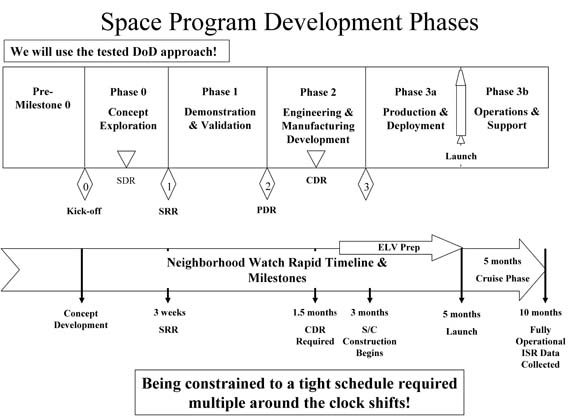
Although the compressed schedule appears nearly impossible, implementing three shifts during the week and three weekend shifts enabled us to "stretch" the schedule to approximately three times the length. Typical space programs are single shift standard work weeks. This approach did impact the mission cost by about fifteen percent as additional risk mitigation oversight, program management, and systems engineering was required.
Figures 8-10 show the basics to the programmatic issues of the program. The technical issues were minimized as much as possible through the use of commercial-off-the-shelf (COTS) and government-off-the-shelf (GOTS) components. In fact, in some instances we cannibalized existing program hardware from NOAA, NASA, NRO, DARPA, USAF, and CIA programs. However, COTS and GOTS did not offer solutions to all of our technical issues.
The first and most major issue was a launch system. Depending on how the spacecraft architecture evolved – meaning its size, weight, and power requirements – the launch requirements still had to be met by existing capabilities within our launch vehicle catalog. Presently, the launch vehicle catalog is limited to Delta, Atlas, and the Space Shuttle. Taking the time constraints into account ruled out the Space Shuttle almost immediately as it takes many months to prepare it for flight. Therefore, the first mission design parameters became, "It must fit on a Delta or an Atlas."
Not only must it be able to be launched via the existing capabilities, but the mission has an urgency to deliver an ISR payload to the planet Mars as rapidly as possible. A minimum time requirement for getting a rocket on the launch pad with a payload integrated into it is typically 75 days. We also understood that Mars would be in opposition to Earth in such a way that required launch windows in late August through September and the kick-off meeting was held in early May. This then drove the design, build, and integration time to the 5 month schedule shown in Figure 10. Therefore, if any extra staging would be required for the launch vehicle there would be little time to allow for launch vehicle modification.
With these constraints in mind, the program management function made the decision to limit the spacecraft to less than 1500 kg total wet throw weight. This enabled the trajectory team to develop the required spacecraft launch vehicle configuration. Unfortunately, the Delta and Atlas rockets were not designed to throw spacecraft to Mars. In fact, they were designed to launch satellites into Earth orbits. The trajectory team led by Dr. Tom Powell developed the delta-v requirements for the mission to Mars and then handed these requirements off to the launch segment team. The launch segment team then developed a 4 stage Delta IV launch vehicle configuration that would enable the capability to throw the 1500 kg spacecraft weight to Mars with a trip time of about 5 months in a Mars flyby configuration.
The launch segment team leader, Dr. John Fisher, interacted with the Boeing and Lockheed-Martin launch services and was able to insure that the required modified vehicle would be ready before the spacecraft payload was ready for integration into the launch vehicle. Boeing and Lockheed-Martin negotiated that Boeing would develop the launch vehicle system and modifications providing that Lockheed-Martin was given the integration contract. This agreement worked well and Dr. Fisher, a Lockheed-Martin employee, worked directly with Boeing to develop the modified Delta IV Heavy shown in Figure 11.
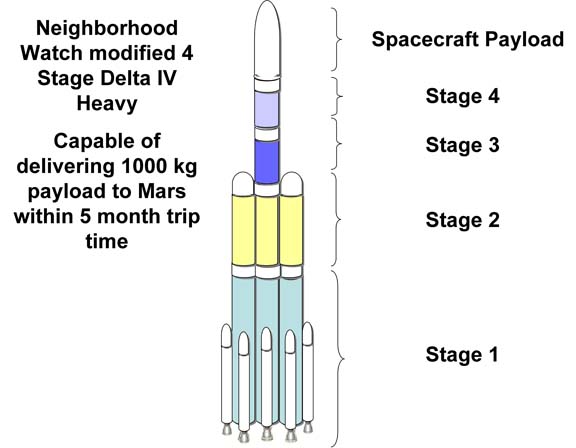
Figure 12 gives a more detailed description of the launch vehicle. The rocket consisted of 4 stages and a combination of solid rocket motors and liquid motors all of which were standard COTS and GOTS components although the first stage was a standard Delat IV Heavy core with 8 strap-on solid boosters and the fuel and oxidizer tanks for the engines on stages 2 and 3 were doubled in size.
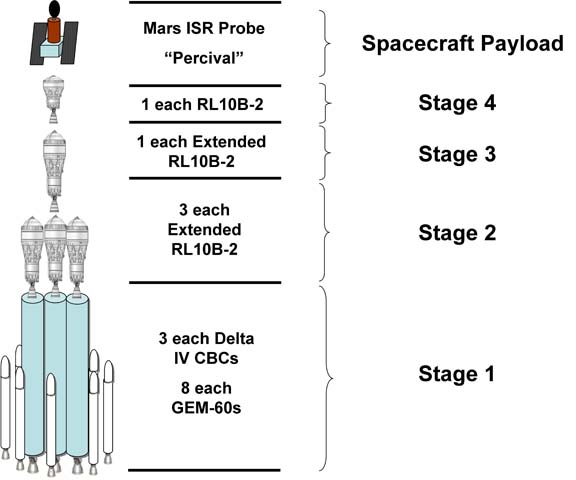
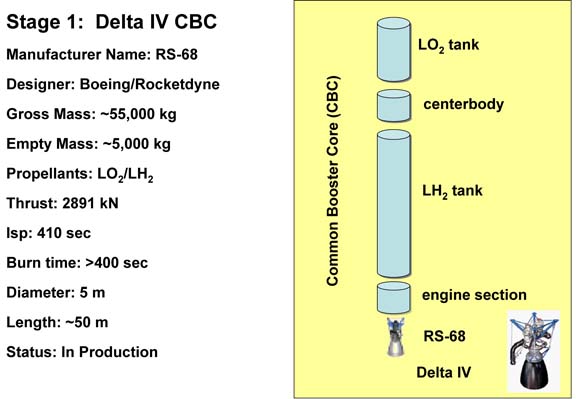
The 4 stage modified Delta IV Heavy launch vehicle consisted of multiple rocket motors. Stage 1 was built around a standard Delta Common Booster Core (CBC) tube with a Rocketdyne RS-68 liquid oxygen/liquid hydrogen (LO2/LH2) rocket motor base with a thrust vector control nozzle in the middle that can supply up to 650,000 pounds of thrust and 410 seconds of specific impulse (see Figure 13 for details on CBC). On either side of the central CBC tube was another CBC tube assembly strapped on. Each of these two strap-on CBCs are identical to the central one and their engines produce the same thrust characteristics as the central CBC. This portion of the rocket was the standard Delta IV Heavy 1st stage.
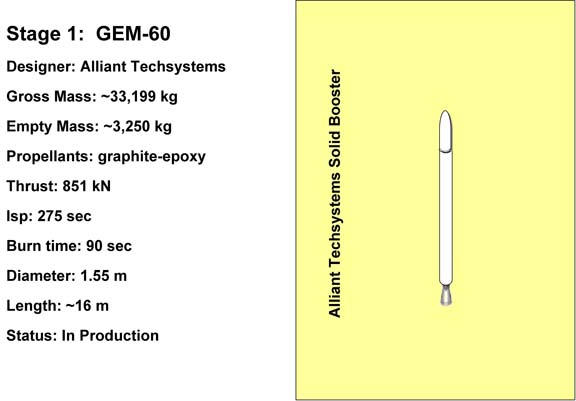
In order to increase the throw weight of the launch vehicle and therefore the mission spacecraft velocity, 8 Alliant Techsystems graphite-epoxy GEM-60 solid rocket strap-on boosters were also attached at the base of each of the three larger CBC tubes of the Boeing built rocket (see Figure 14 for GEM-60 strap-on details). The GEM-60 strap-ons enabled the launch vehicle to accommodate a larger spacecraft payload than the standard Delta IV Heavy. This was required because Percival's throw weight to Mars was on the upper limit for the fast mission timeline. The half meter diameter primary mirror and support hardware for the telescope alone ended up being over 90 kilograms with the other instruments and spacecraft structure, there was just no way the Delta IV Heavy and two upper stages would get the satellite to Mars in the hoped for four to five month mission time. Dr. Tom Powell and Dr. John Fisher developed the architecture modification of the solid strap-on boosters for the added boost. The launch segment team interacted with the Boeing engineers until the modification design was complete and hardware was developed. However, Boeing did require that a liability waiver for new unflown hardware be given in case of failure.
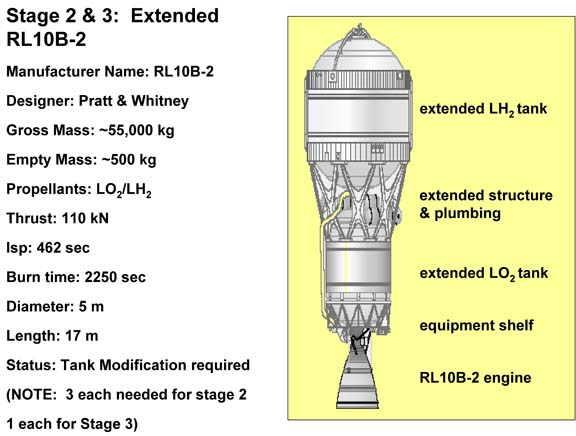
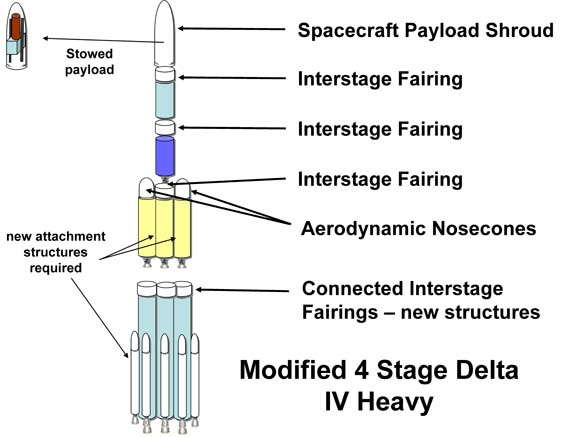
Above the 3 CBCs of the 1st stage were modified staging fairings to Stage 2. Stage 2 consisted of 3 modified Pratt & Whitney RL10B-2 cryogenic rocket motor upper stages. A standard RL10B-2 supplies as much as 60,000 pounds of thrust over a burn time of 1125 seconds. The modification to the 3 engines on the 2nd stage was that he oxidizer and fuel tanks were doubled in volume by stretching them upward without increasing their diameter. This was done by basically welding two tanks together and beefing up the structure. Also, the 3 engines had to be connected via new structural components as this type of 3 engine 2nd stage had never been flown on a Delta IV Heavy before. See Figure 15 for details on the extended RL10B-2 engines. Also, aerodynamic nosecones were attached to the tops of the engines on either side of the central one. Atop the central engine was another staging fairing and the 3rd stage.
Stage 3 consisted of another extended or stretched RL10B-2 engine. The structural requirements for the rocket housing were standard from this point. Atop stage 3 was a standard staging fairing.
Stage 4 was a standard RL10B-2 engine as shown in Figure 16 and was the final booster stage. This stage was used for final boost and trajectory optimization thrust. Then above that was the standard aluminum isogrid payload fairing and shroud, which housed the all important mission spacecraft - Percival.
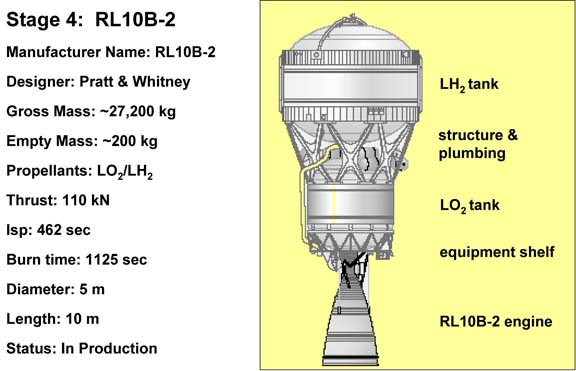
Figure 17 shows the staging configuration giving a visual description of the stage fairing and nosecone locations. The figure also gives a general idea of the appearance of the outside of the final launch system attachment and new structure requirements.
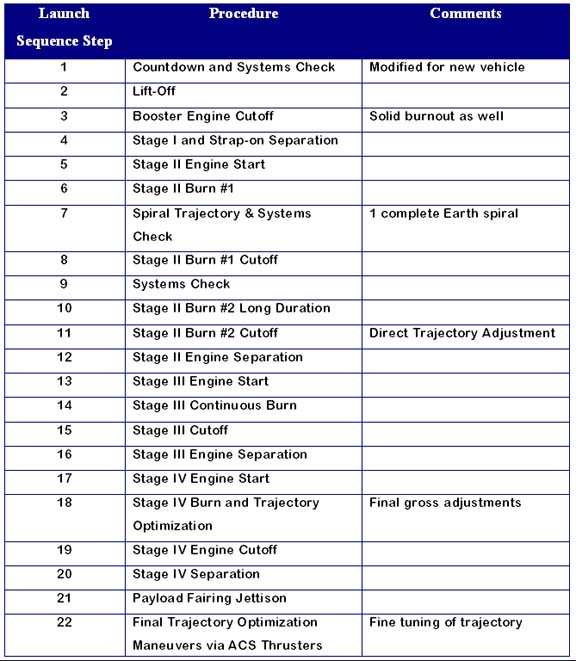
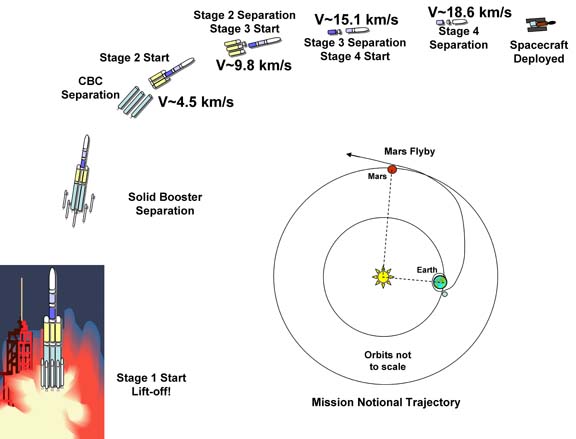
With the launch vehicle description determined the launch sequence could be developed. For convenience, standard procedures were used as much as possible. Table 1 shows the launch sequence steps, procedures at each step, and comments related to those steps. Figure 18 shows a graphical depiction of the launch segment steps.
The launch location was the Space Launch Complex 37 (SLC-37) at Cape Canaveral Air Force Station (CCAFS), Florida. The existing pad and gantry were sufficient for the modified Delta IV Heavy configuration. Boeing and the United States Air Force 45th Space Wing managed the details of the launch and launch operations.
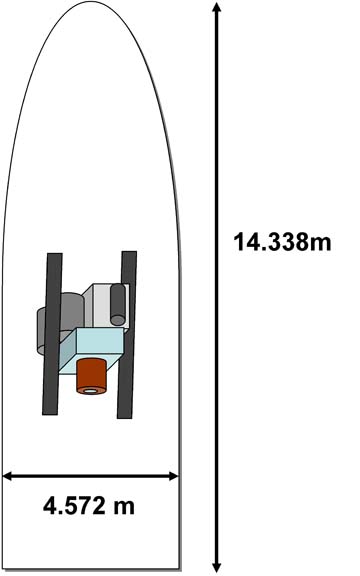
With the launch vehicle configuration determined, this enabled the space segment team to begin to parameterize the spacecraft configuration. From the trajectory calculations the upper limit on spacecraft mass was set at 1500 kg. Also, the sizing became certain as the largest COTS Delta IV payload fairing/shroud configuration drove the maximum possible stowed spacecraft physical dimensions and configuration. Figure 19 shows the payload shroud and notional spacecraft in the stowed configuration. The actual stowed volume of the spacecraft was much less than that available for the Delta IV family of shrouds. The Delta IV Medium 5m outer diameter shroud was chosen to save mass on the shroud upper body and due to one being readily available for a planned NASA/NOAA launch. Neighborhood Watch was given precedence over all other national assets and therefore the entire launch vehicle components list for the NOAA mission was commandeered. This improved the timeline dramatically.
From Figure 19 it is clear that the payload sizing configuration was not an issue. Even the large solar panel requirement did not prove to be a sizing constraint. Therefore, power would not be constrained from solar panel sizing due to available launch volume.
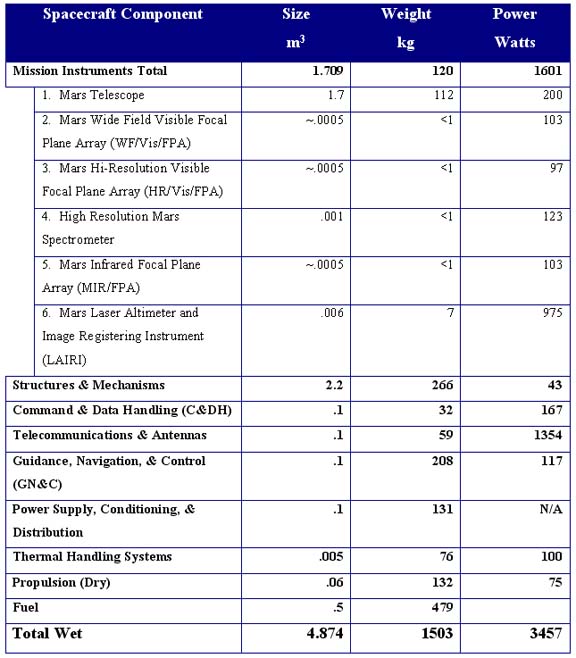
Spacecraft Concept Summary: When fully assembled and fueled Percival was constrained by the launch mass of 1500 kg in order to reach Mars at the desired pace. The total dry mass of the spacecraft was to weigh less than 1000 kg leaving 500 kg for fuel for the onboard trajectory optimization and attitude control system (ACS) thrusters.
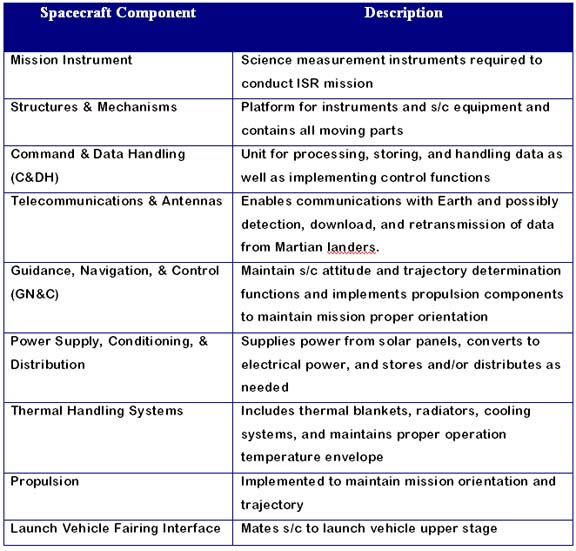
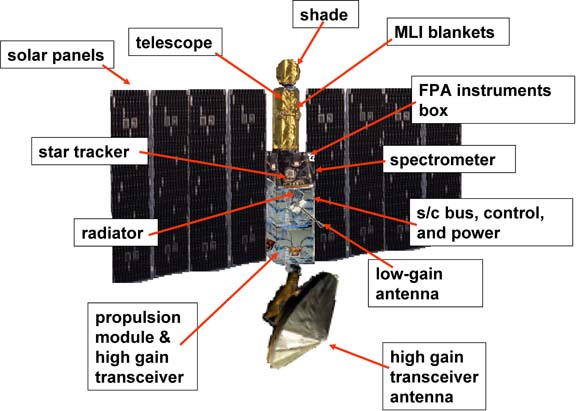
Spacecraft Components: Percival was designed by integrating a Ball Commercial Platform (BCP) 2000 satellite bus with the ISR payload and added propulsion compliment. Ball Aerospace often has several satellite systems being constructed and integrated at their facility and fortunately was in the final stages of construction for a commercial imaging platform using the BCP 2000. This system was commandeered and used as the backbone of Percival. The BCP 2000 is a standard commercial satellite system with heritage on QuickSCAT, ICESAT, Quickbird 1, Quickbird 2, and various other classified programs. The bus was modified to accommodate the instruments and components for the Neighborhood Watch. These major spacecraft components are given in Table 2.
The main reason for the space mission is to place the right suite of mission instruments close enough to Mars to determine characteristics of the phenomenon occurring there. Hence, a well rounded suite of instruments were chosen that would enable the data analysis team in the post mission phase to ascertain details of the Mars issue. The instruments suite consisted of 6 instruments listed in Table 3.
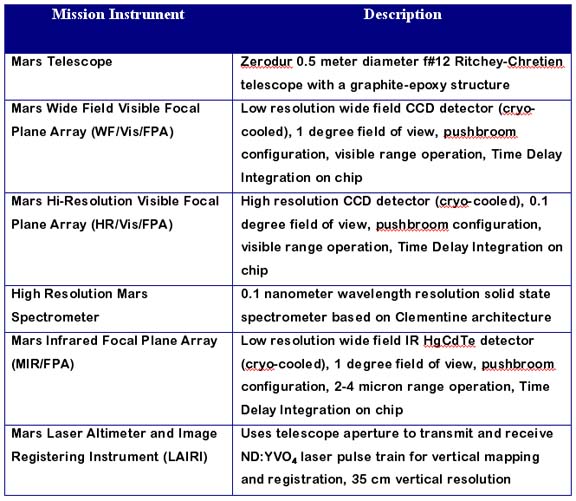
The Mars Telescope was the only built from scratch item on the spacecraft. Unfortunately, there were no space qualified half-meter range telescopes available at the time. An optical design was developed from requirements within two weeks from the Kickoff meeting. The structural design was complete a few weeks later. Contracts were let to CTI, Lightworks, Composite Optics, and Zeiss optics companies with the hopes that one of the three companies would complete the task successfully within the schedule. Redundant contractors helped to mitigate risk. The Zeiss system was the only one at the end of the contract period that was complete and able for spacecraft integration. No fault should be placed on the other contractors as this program operated under a continuously impossible schedule. Table 4 gives the optical design parameters of the Mars Telescope as developed by Dr. Reynolds and delivered to the subcontractors. The telescope optics were made of Zerodur.
D1—Diameter of the Primary Mirror: 500.00
F1—Focal Length of the Primary Mirror: 1000.00
A1—Focal Ratio of the Primary Mirror: 2.00
R1—Radius of Curvature of the Primary Mirror: 2000.00
X1—Sagitta of the Primary Mirror: 15.6865
E1²—Eccentricity at Square of the Primary Mirror: 1.022
L1—Linear Field Diameter of the Primary Mirror: 3.49
D2a—Axial Beam Diameter of the Secondary Mirror: 142.86
D2w—Clear Aperture Diameter of the Secondary Mirror: 145.35
F2—Focal Length of the Secondary Mirror: 342.86
R2—Radius of Curvature of the Secondary Mirror: 685.71
X2a—Sagitta of the Secondary Mirror [D2a]: 3.7304
X2w—Sagitta of the Secondary Mirror [D2w]: 3.8621
E2²—Eccentricity at Square of the Secondary Mirror: 2.094
D3—Minimum Diameter of Hole in the Primary Mirror: 93.51
F—Effective Focal Length of the System: 6000.00
A—Effective Focal Ratio of the System: 12.00
L—Linear Field Diameter of the System: 20.94
Dm—Mirror Separation: 714.29
BWD—Back Working Distance: 1000.00
BFL—Back Focal Length: 1714.29
ODS—Object Distance of the Secondary Mirror: 285.71
Dfs—Diameter of the Front Shield: 157.38
Lfs—Length of the Front Shield: 40.30
Drs—Diameter of the Rear Shield: 113.14
Lrs—Length of the Rear Shield: 273.31
Dep—Diameter of the Exit Pupil: 162.16
Lep—Exit Pupil Distance: -1945.95
Eab—Central Obstruction [D2a/D1] in [%]:28.57
E2w—Central Obstruction [D2w/D1] in [%]:29.07
Efs—Central Obstruction [Dfs/D1] in [%]:31.48
D1i—Diameter of Inoperative Zone of the Primary Mirror: 142.86
D2i—Diameter of Inoperative Zone of the Secondary Mirror: 38.32
Q—Central Obstruction Ratio: 0.29
ß—Reciprocal Magnification of the Secondary Mirror: 0.34
m—Magnification of the Secondary Mirror: 6.00
2w—Unvignetted Field Angle in Degrees [°]:0.20
Seidel Aberration Coefficients
SI—Coefficient for Spherical Aberration: -0.00000
SII—Coefficient for Meridional Coma: 0.00000
SIII—Coefficient for Astigmatism: 2.19444
Table 4. Mars Telescope optics design parameters
(all dimensions in mm)
Figure 20 shows the optical design configuration of the Mars Telescope along with the focal plane instruments and optical path bending components: WF/Vis/FPA, HR/Vis/FPA, High Resolution Mars Spectrometer, MIR/FPA, and the Mars Laser Altimeter and Image Registering Instrument.
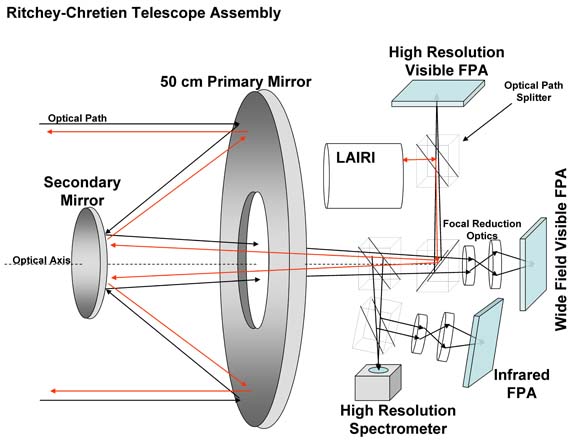
Not shown in Figure 20 are the optical baffles and the composite graphite-epoxy optical tube assembly as well as other telescope support structures. This will be discussed later in this section.
The optical system was tested before and after coatings and were measured flat to within 1/40th of a wave at 632 nm. The system was tested for wavefront distortion and was found to be a truly state-of-the-art optical system, which is amazing considering the fact that the entire optical design through manufacturing process took place in less than 3 months. Figure 21 shows a summary of optical test data for the final telescope product.
The system delivers bright Bessel's Sinc or Air disk functions under the "star test" and has no detectable defocus at the various focal planes.
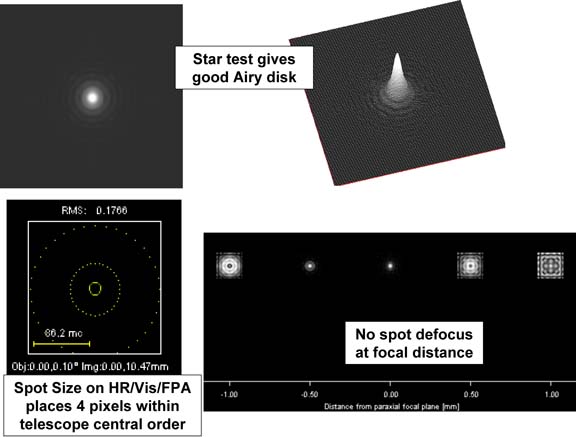
This suite of Mission Instruments were chosen to enable detailed mapping of the Martian surface and therefore shed some light on the albedo change phenomenon. Since the telescope aperture is 0.5 meter in diameter and the telescope was matched to the FPA so that maximum resolution would be obtained on the direct focus HR/Vis/FPA system the only parameter required to determine on ground resolution was the altitude at flyby. Analysis of the atmospheric pressure at Mars suggests that a flyby with the solar panels extended any lower than 40 km or so could likely cause catastrophic drag problems. Therefore, the mission was designed to reach a 50 km minimum safe flyby altitude. Figure 22 shows the image resolution on the ground at Mars versus altitude.
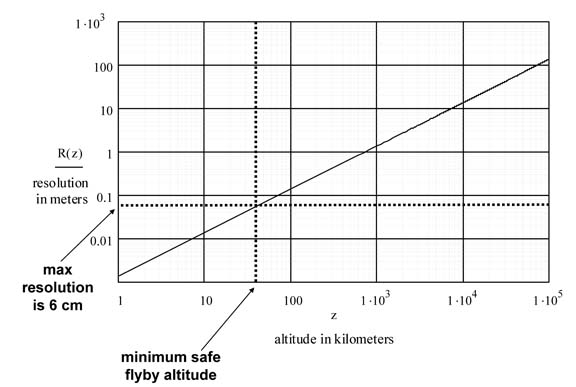
It was decided that a flyby would be better than an impact as the flyby offers the opportunity for collecting ISR on the way into and out of the Mars sphere of influence. Orbital missions were possible but with the weight requirements for entering orbit and the slower approach velocity would have caused a mission trip time of much longer. Since the entire planet Mars seemed to have changed, it was decided that a flyby would suffice for the mission concept of operations. Also, the telescope on the probe will deliver 7 cm resolution images at the minimum safe altitude and even at 100,000 kilometers away a resolution of 100 m is achievable.
One important fact to recall here is that the spacecraft will be traveling at roughly 15 km/s Mars relative velocity. This means that the spacecraft will only be in range for taking data with meaningful resolution for a few hours. The telescope pointing algorithm was automated to dither around the planet's equatorial plane out to the poles and then back in taking as many images as possible during the flyby segment. The spectroscopic data will be meaningful for at least 30 hours or so from the closest approach and therefore was implemented first. The telescope systems were also initiated at this point to maintain system operation confidence and to mitigate any possible failure modes if they occured. Fortunately, no failure modes occurred during the mission.
The Mars Laser Altimeter and Image Registering Instrument (LAIRI) used a neodymium doped yttrium orthovanadate infrared laser system to send a laser pulse train to the martian surface. The reflected pulses were viewed by the Mars Telescope aperture and were then focused onto the MIR/FPA. The timing of the pulse train of the laser was well known and therefore range data to the pixel on the surface was acquired. A comb filter function was placed in front of the laser so that an array of spots were placed on the surface. This enabled the system to gather range data to multiple pixels per image, thus registering the surface image vertically.
The Structures and Mechanisms components support all other components of the spacecraft and supply a platform from which to perform their individual tasks. The structure must support launch vehicle attachment, launch environment, space environment, thermal variation must be minimized for any ISR platform, and must also offer environment protection while in space. The structure of Percival was a modified Ball Aerospace BCP 2000 satellite structure. The platform was modified to mate to the ISR instrument platform housing the composite graphite-epoxy Mars Telescope optical tube assembly (OTA). The OTA was supported on composite struts and connected to a composite FPA instruments housing. Below that was connected the standard BCP 2000 components. Figure 23 shows the central body structural components.
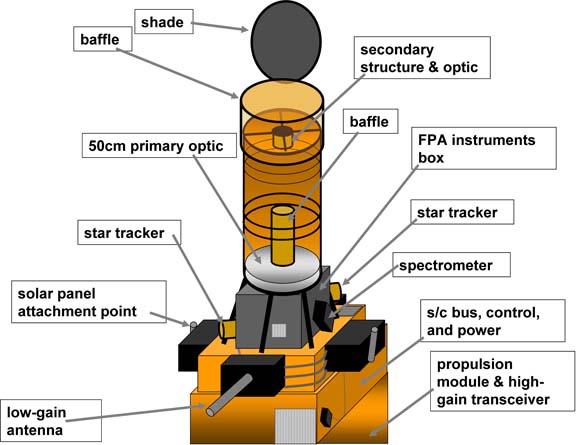
There were basically 3 main sets of mechanisms on Percival: high-gain antenna gimbals, solar array deployment and pointing mechanisms, and the telescope cover/shade. Each of these mechanisms was standard heritage items from multiple missions and both Ball and Lockheed-Martin understood the requirements and manufacturing process well. Ball delivered the mechanisms and Lockheed-Martin integrated them into the spacecraft.
The brain of Percival was built around a 133 MHz PowerPC processor like the one used in the NASA Mars Reconnaissance Orbiter. The space qualified processor used VxWorks operating system. The main cpu system and flight software was constructed, written, tested, and delivered by the Jet Propulsion Laboratory to the spacecraft integration facility. The C&DH cpu system used an independent vehicle health monitoring system that fed inputs of vehicle health into the command algorithms. A "watchdog timer" process was implemented to enable system resets in the event of a system failure mode. One such reset occurred during solar panel deployment, but the watchdog system functioned properly, reset the confused bus address, and executed the proper predetermined mitigation action. The system functioned flawlessly for the remainder of the mission.
The data handling was managed via a solid state data recorder. The system was basically four arrays of solid state memory chips. Each array consisted of 700 chips. The complete data storage capability for Percival was 640 Gigabits of information, which was about 22 images from the HR/Vis/FPA at a time. The data was delivered in the "store and forward" process. Images were captured and stored and forward on a continuous stream via the high-gain transceiver. As soon as each image was transmitted 2 times it was purged from the memory and a new image was taken and placed in its place. A standard instrument allocation timeline was developed such that each instrument that required large data storage was given equal memory storage allotments. The laser system, telemetry, tracking, command signals, and other command functions were low data rate and were carried through the low-gain antenna.
The telecom system consisted of the high-gain antenna, three low-gain antennas, X-band transceiver, Ka-band transceiver, 3 traveling wave tube amplifiers (TWTA), and a copy of the radio package Electra that flew on the Mars Reconnaissance Orbiter.
The high-gain antenna was a 3 m dish antenna with high-gain low noise block-down amplifier feedhorn. The large dish system was stowed for launch and then deployed shortly after system check and final trajectory optimization burn. The antenna was pointed via gimbaled steering mechanisms. At Mars the data rate available from the system was about 10 megabits per second. This was slightly higher than similar previous "white world" systems. The reason for this was having slightly more efficient TWTAs and being able to run them at a few percent higher power output. An important design feature that played an important role in the mission's limited success is the fact that we were data rate limited. At maximum transmission rate it took about 48 minutes to transmit 1 image from the telescope back to Earth! This was the reason the "store and forward" approach was used.
Three standard low-gain antennas were used for the smaller bandwidth requirement transmissions. One low-gain omnidirectional antenna was extended from the center of the BCP 2000 external structure and extended out from the structure by 1 m. The second and third low-gain antennas were mounted on the front and back sides of the high-gain antenna. In this configuration continuous line of sight with the low-gain transceiver was maintained.
The high power TWTAs were located in the lower half of the BCP 2000 and shared that structure with the propulsion module components. Two TWTAs are used by the X-band system and one by the Ka-band system. The TWTAs were used to amplify the signal from the digital transponder radio transceivers. Two transponders were used in the spacecraft with one transponder as a redundant system.
A copy of the Electra telecommunications package that flew on the Mars Reconnaissance Orbiter was added to the spacecraft. The Electra system was designed to enable Mars orbiting vehicles to develop radio communications links with landers and rovers on the Martian surface. This system was added with hopes of developing a link with any possible surviving surface vehicles that for some reason could not be detected by the Deep Space Network. This package did not prove successful. No evidence of landers or rovers was ascertained during the flyby.
The GN&C system was designed to maintain the orientation of the spacecraft with proper required mission attitude, optimize the trajectory for close flyby, and to maintain knowledge of the spacecraft platform location and instrument pointing direction. This spacecraft system consisted of basically two subcomponents: sensors and control devices.
The sensors were used for attitude determination. There were two star tracker systems, each mounted just beneath the Mars Telescope structure on either side of the exterior of the FPA Instruments Box. Although two systems are redundant, both star trackers were used to increase pointing knowledge accuracy. Failure mode was with one star tracker functioning only and would be sufficient for the mission. These star trackers were heritage and standard COTS parts.
There were also 10 suns sensors placed around the exterior structure of the spacecraft. Half of them were redundant systems. These were simple heritage detectors and offered a simple on or off bit of data to the C&DH. Again these were simple COTS components.
Two standard inertial measurement units (IMUs) were also used. These systems were standard ring laser gyroscopes and accelerometer construction. The were used to enable spacecraft rotation and acceleration change rates – angular acceleration and jerk. The IMUs were necessary as the sun sensors and star trackers typically are inaccurate in short periods of maneuvering corrections.
The Mars Telescope was also used to optimize trajectory to Mars. As the telescope was implemented early in the mission, images of Mars were taken at low resolution giving the positions of Phobos and Deimos – the Martian moons. Accurate calculation of these moons positions also improved spacecraft trajectory knowledge.
The control devices implemented in Percival were COTS systems. Standard hydrazine attitude control system (ACS) thrusters were used. There were also 4 standard COTS reaction wheels arranged in a standard 3 axis configuration with one tilted off either of the axes to be used as a redundant component in failure mode.
The spacecraft main power was supplied by two solar panel arrays. Each array was 4 m x 3.5 m with a surface area of 14 m2. The total solar panel surface area was 28 m2. The panels operated at about 26% efficiency. The solar irradiance at Mars is between 300 and 600 W/m2 depending on its orbital location around the Sun. During the mission time for the flyby, the incident irradiance was about 500 W/m2 and therefore the solar panels supplied about 3640 W of power. This power is then conditioned to a 32 volt output, which is made available for the spacecraft through various wiring harnesses on the power systems bus. There are also backup nickel-hydrogen batteries onboard so that the spacecraft systems do not depend on the solar panels in a continuous mode.
The spacecraft systems implement a multifaceted thermal handling capability. Heat pipes are connected to most equipment that generate heat and are used to carry the heat away from the instrument to radiators on the exterior of the spacecraft. Thermostats are implemented throughout the spacecraft to maintain knowledge of the thermal profile across the spacecraft components. Input from the thermostats to the C&DH cpu drives subroutines to turn on or off the cryogenic cooling system flow for that portion of the spacecraft. The cryo system was mainly designed for cooling the FPA Instruments and the primary optic of the Mars Telescope. The cryo system added about 100 kg mass to the spacecraft.
The primary thermal handling component on Percival were multilayer insulation (MLI) blankets. These blankest consisted of layers of Nomex and Kapton. The MLI is most obviously noticed surrounding the Mars Telescope structure on the spacecraft.
Percival implement COTS hydrazine monopropellant thrusters for in-space ACS and trajectory optimization. The propulsion system was housed in the lower portion of the BCP 2000 structure and consisted of:
Propellant Tankage – stored the 500 kg of hydrazine fuel
Pressurant Tankage – stored the pressurized helimu that was used to force the fuel through the flow system and over the ignition catalyst
Plumbing – flow lines, valves, and regulators all COTS
Thrusters – 6 each 20 Newton thrusters for trajectory optimization and 8 each 1 Newton thrusters for ACS
Attachment Structure – housed and connected the thrusters, plumbing, and tankage to the spacecraft structure
The propulsion system performed flawlessly during all phases of the mission.
Percival was mated to the modified 4 stage Delta IV Heavy with a standard Boeing 4394-5 Payload Attachment Fitting (PAF). The PAF is shown in Figure 24. The spacecraft was attached to the fitting with 72 bolts spaced uniformly around the PAF circle.
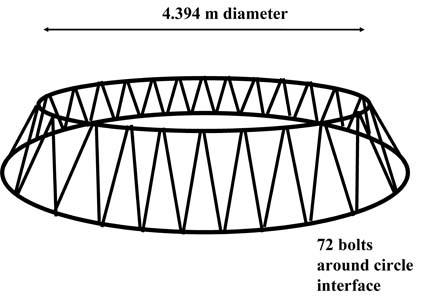
Figure 25 shows the final configuration for the Mars ISR Probe, Percival. The picture was taken at the integration facility in Huntsville, Alabama before it was packaged and flown to the CCAFS facility. The facility background was edited from the photo in order to give a full view of the spacecraft. The final spacecraft size, weight, and power description is given in Table 5.
Mission Timeline: The ascent phase of the mission was discussed in detail in earlier sections of this report. Here we will discuss the mission timeline from Cruise Phase to Closest Approach Point to Loss of Communication with the spacecraft.
The Cruise Phase of the mission began only hours after the launch segment was completed and the final trajectory optimization burns were conducted with the final stage engine. Once the final stage was separated and the spacecraft was free of the upper stage fairing the check and deployment processes were begun. The spacecraft checked out fine and the solar panels were deployed.
Once Percival reached the halfway point to Mars the science instruments were brought online and data gathering began. At 30 days from Mars the spectrometer was brought online and spectral data and albedo measurements of the planet were taken. It was clear at this point from the data that the Martian albedo was impacted by refined and manufactured surfaces. There were also new absorption lines. More about the data will be discussed in the next section.
At 1 day out the imaging instruments were brought into sequence – minus the laser altimeter. At 2 hours from Closest Approach the laser system was brought online. At this point the Electra system was also initiated, but no contact with the Martian landers was made. Percival passed through the Closest Approach point and all systems were operating perfectly and ISR data was being transmitted back to Earth.
1 minute and 4 seconds from the minimum altitude point Percival stopped sending all telemetry and data transmissions from all transponders. The last data from the laser altimeter corroborates that the range to the same region of interest on the planet that it had viewed at minimum altitude (54.7 km) was 961.5 kilometers when all contact was lost with the probe.
The 11 minute speed of light transmission delay between Earth and Mars made it difficult to conduct rescue efforts. Also, data received and compiled from all sensors on board the spacecraft suggests that the spacecraft had likely been destroyed.
The first sign of spacecraft failure came as a vehicle health monitoring alert on the high-gain antenna. The last alert was of structural integrity failure. There were multiple alerts between the two points in time, which were only 1.32 seconds apart. This suggests a catastrophic failure of the vehicle. The following is the sequence in the final 1.32 seconds of Percival's life:
Alert – high-gain antenna load on gimbals increasing
Alert – star tracker detects rapid angular acceleration and loses star field lock
Alert – high-gain antenna attitude unknown, watchdog reset initiated
Alert – electrical systems failure from port solar panel array
Alert – FPA Instruments Box failure mode status
Alert – low-gain antennas 1 & 2 failure mode status
Alert – ACS system failure mode status, pressurants tank leakage
Alert – BCP 2000 structural integrity failures, multiple
Since the final remaining low-gain antenna was attached in the center of the BCP 2000 structure, we assume it was lost at this point and therefore the last of the communications equipment had been compromised.
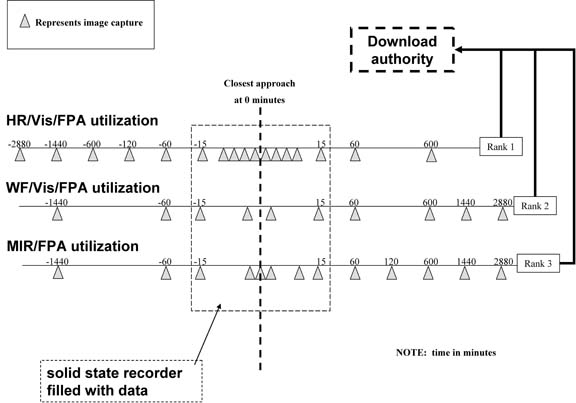
Figure 26 gives Data Sequence Gathering Timeline for the three high data storage/relay requiring instruments. The HR/Vis/FPA was given priority over the other two as this was considered to be the most important image information of the mission. Also, note that the data recorder would be filled with images during the closest approach point. The data was to be downloaded with the authority shown.
Recall from the telecommunications and the C&DH discussions in earlier sections that approximately 45 minutes were required for Percival to download a single image from Mars. Figure 27 shows the data download sequence that was occurring up until the last second when Percival was lost. No near Mars images were received from any of the instruments. A complete high resolution image from about 50,000 km was the last complete image received. A high resolution image from about 13,000 km was being received when Percival was lost. The image was approximately 35% downloaded at that time.
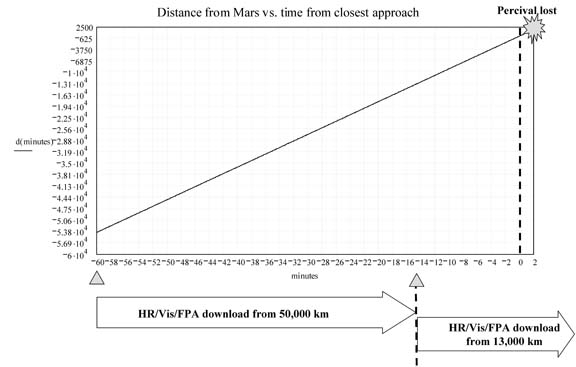
Figure 28 is the last complete high resolution image taken. The image was taken at roughly 50,000 km from Mars closest approach and has a resolution of about 60 m per pixel. The area is of the Reull Vallis in the southern highlands east of the Hellas Basin. The Martian Latitude is -42.5 degrees and the Longitude is 103.2 degrees east. Note that the image no longer looks like the surface of Mars as we have come to know it. The surface is no longer smooth with occasional impact crater markings. Instead it has a complex and unnatural texture overlaying the surface. Image reference 1 shows a long straight line of about 50 km long. Could this be a long roadway like the interstates on Earth?
Image reference 2 is a region of detailed grid-like patterns that appear to be structures not unlike a large city would appear from that distance, although the features are too large for human build architecture. Also note that the box in Image reference 2 is the region that the partial image at higher resolution was taken (see Figure 29).
Image reference 3 shows regions of very high specular content. The specular reflection in this portion of the image is several orders of magnitude higher than should be on Mars.
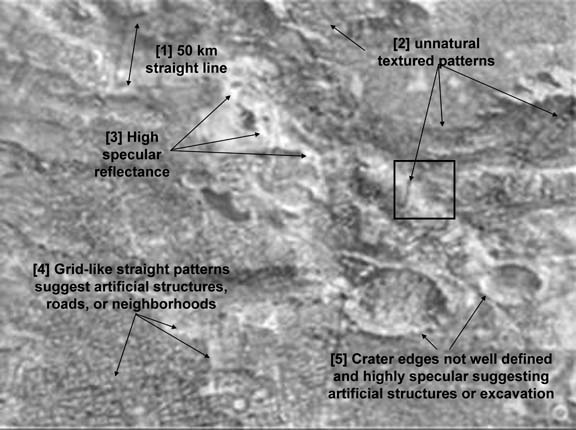
Image reference 4 shows more of the detailed grid-like texture on the Martian surface. Again, this appears as a city; however, the scale is extremely large.
Image reference 5 contains two once very distinguished impact craters that now have soft edges and contain high specular reflectivity regions. The soft edged craters suggest excavation or perhaps construction on the spatial ridges of them.
Figure 29 shows the partial image that was being transmitted when contact was lost with Percival. The image was taken at about 13,000 kilometers with a spatial resolution of about 20 m per pixel. Image reference 1 shows a distinct grid-like texture reminiscent of a roadway infrastructure. One stretch of "road" running north and south is perfectly straight for about 20 km.
Image reference 2 shows 3 impact craters that are mostly covered by artificial structures. Again as in the previous image, this suggests massive excavation and construction.
Image reference 3 shows several very large structures with dimensions as large as 1-3 kilometers on a side. These objects are as large as the Great Pyramid. Interestingly enough, these structures are not very specular in this image.
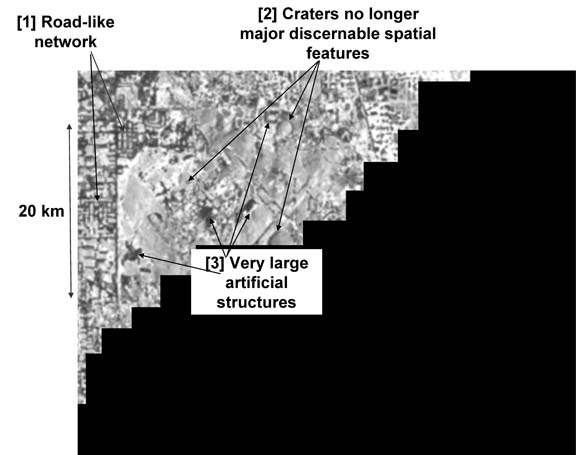
The two images shown in Figures 28 and 29 are the most important and useful data that was achieved by the Neighborhood Watch mission. Spectroscopy data was obtained that backs up the data in the imagery. The spectroscopy data is basically a repeat of the information displayed from the HST data given in Figure 2 but with a much higher reflectance uniformly across the visible spectrum. No useful data from other instruments were transmitted.